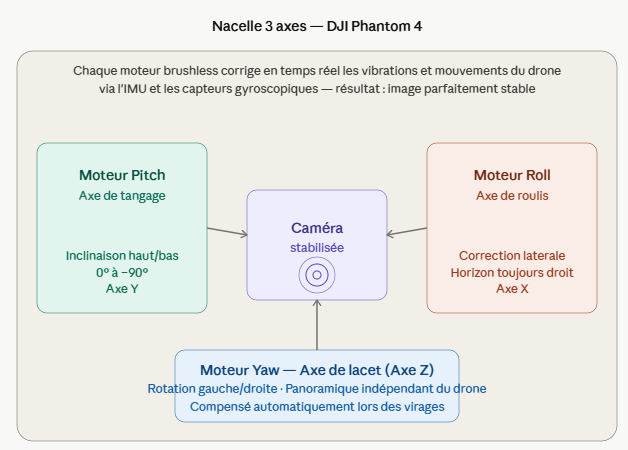
Les different moteurs de la nacelle d'un DJI Phanton 4 et leur roles


1. Les détails de chaque moteur :
Moteur Pitch (axe Y — tangage) C'est le moteur qui contrôle l'inclinaison de la caméra vers le haut ou vers le bas. Sur le Phantom 4, il permet de viser de 0° (horizontal) à −90° (nadir, c'est-à-dire en regardant directement vers le sol). C'est lui qui est pilotable à distance via la molette de la télécommande.
DRONE BUSINESS CÔTE D'IVOIRE
Vente de drones et services associés.
Contacts
Information
+225 01 42 15 43 12
© 2025. All rights reserved.
+225 27 22 38 31 52
info@dronebusines.com